Sîstema şopandin û pîvandina senkronîzekirî ya pir-çarçoveyî

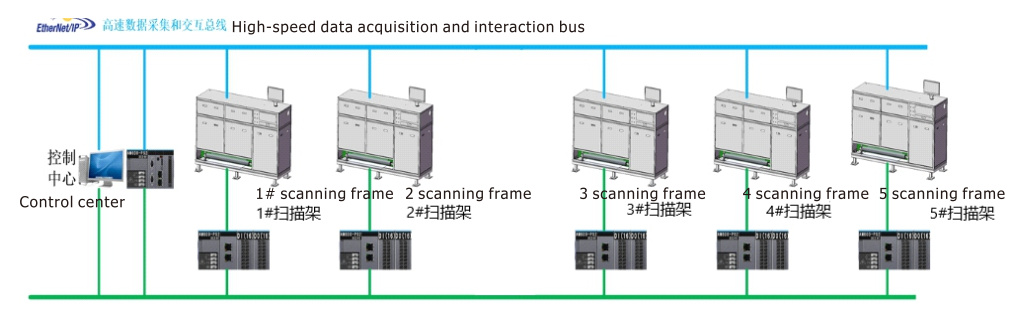
Nexşeya otobusa EtherCAT
Teknolojiya Lêkolîn û Pêşveçûnê ya Serbixwe: hosteya kontrola pîşesaziyê + kontrolkera tevgerê (EtherNet + EtherCAT)
Rastbûna senkronîzasyonê
Rastbûna senkronîzasyonê: xeletiya senkronîzasyonê ≤ 2 mm (bi kodkera pêçanê ve girêdayî ye);
Kontrolkerek tevgerê ya taybetî û kodkerek rastbûna bilind-bilind hatine çêkirin, da ku rastbûna şopandina senkronîk misoger bikin.
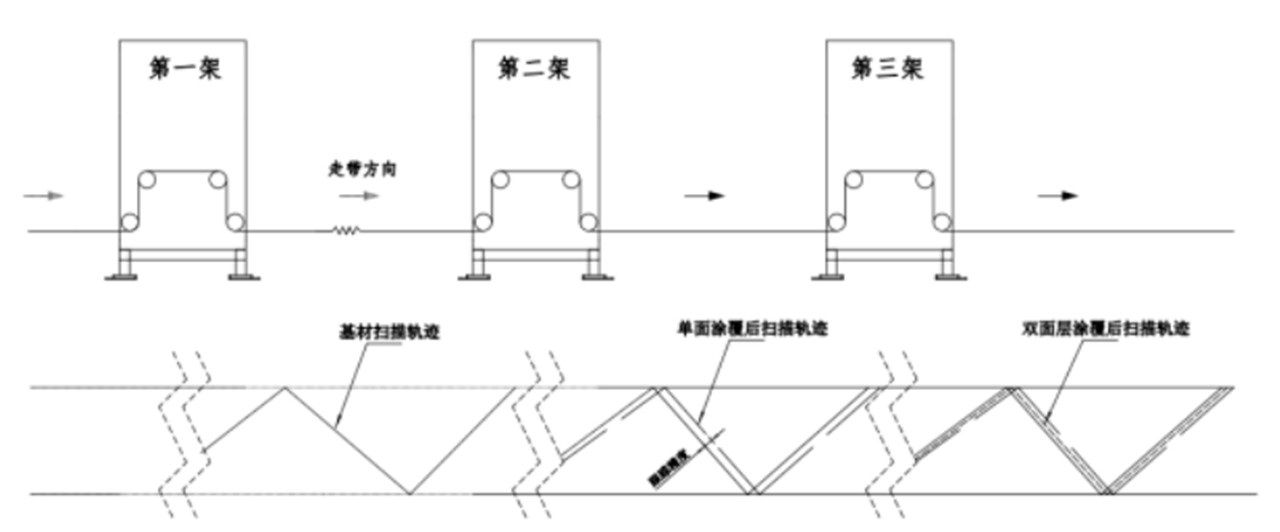
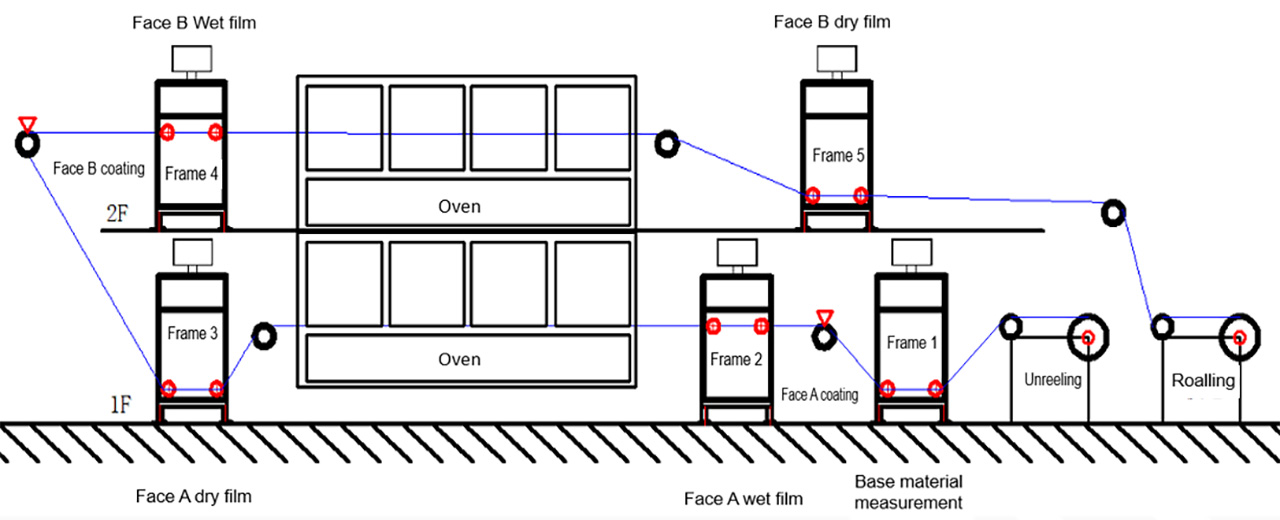
Diyagrama şopandina pir-çarçoveyî
Nermalava kontrolê
Navrûyên dewlemend bi agahî; xerîdar dikare bi awayekî vebijarkî ji bo çarçoveyan 1#, 2# û 3# navrûyan hilbijêre;
Ji bo îstatîstîkên CPK, Max û Min û hwd. peyda dibe.

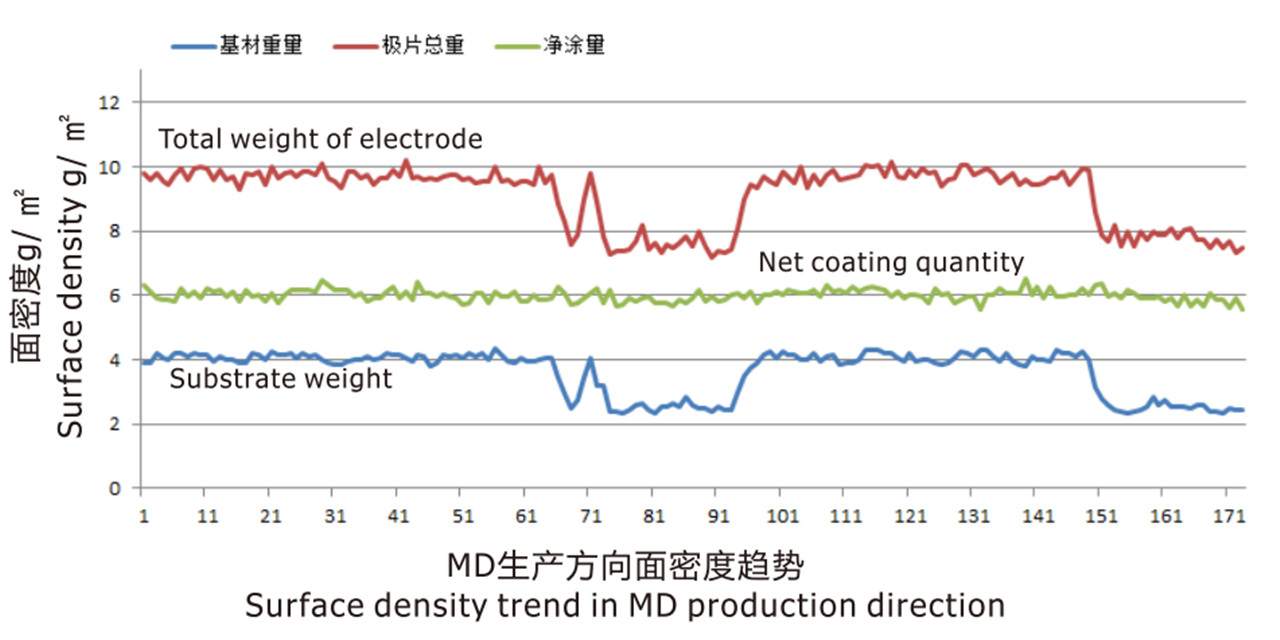
Pîvandina mîqdara pêçandina net
Pîvandina mîqdara net a pêçandinê: Di pêvajoya pêçandinê de yekrengiya mîqdara net a pêçandinê nîşana bingehîn a kalîteya elektrodê ye;
Di pêvajoya hilberînê de, giraniya giştî ya pelê sifir û elektrodê di heman demê de diguhere û bi pîvandina cudahiya du çarçoveyan, mîqdara pêçandina net bi bingehîn sabît dimîne. Çavdêriya bi bandor a mîqdara pêçandina net ji bo elektroda bataryaya lîtyûmê pir girîng e. Paşxaneya berhevkirina daneyan di wêneya jêrîn de: pêçandina anodê ya yek-alî, rolek 2,000 metreyî tê hilberandin, seta yekem a amûra pîvandina dendika rûberê ji bo pîvandina cudahiya pelê sifir berî pêçandinê tê bikar anîn; di heman demê de seta duyemîn ji bo pîvandina giraniya giştî ya elektrodê piştî pêçandinê tê bikar anîn.

测量仪.png)








